Dec 2024 – August 2025
[Sci. Rep.] High Performance Wearable Joint Sensor
First Author
Accepted for Publication:
Qinsong Guo, Rui Li, Zion Tse, Katsuo Kurabayashi, “A soft, low-stiffness, and high-resolution supercoiled polymer torsional sensor for wearable joint monitoring,” Scientific Reports.
Full Abstract:
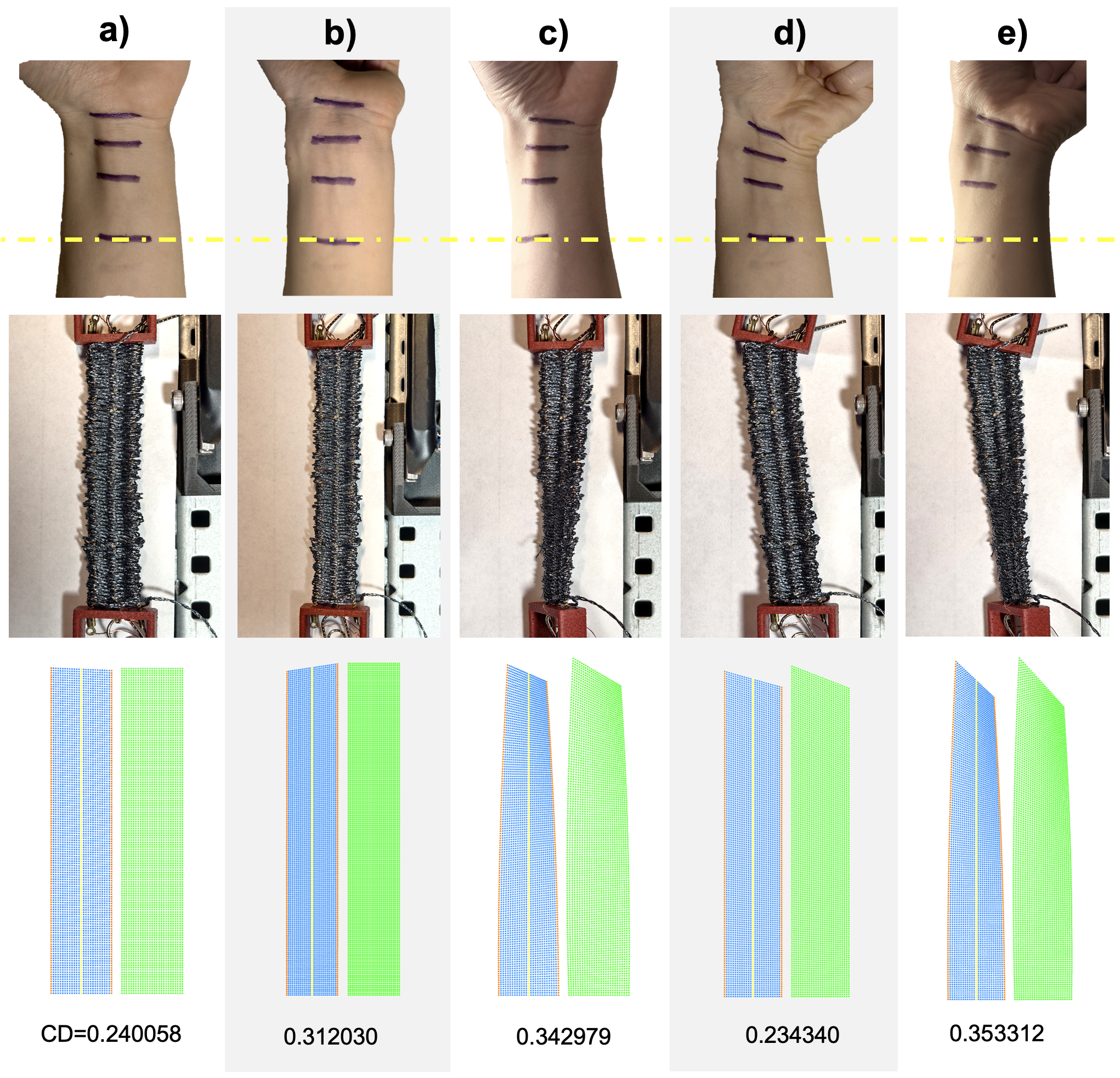
Human hands are complex kinematic systems subjected to roll, slide, and spin movements, which pose a significant challenge for wearable devices. This paper presents a low-cost, ultra-low-stiffness, and high-resolution torsional strain sensor based on supercoiled twisted-and-coiled polymer (TCP) structures for wearable applications.
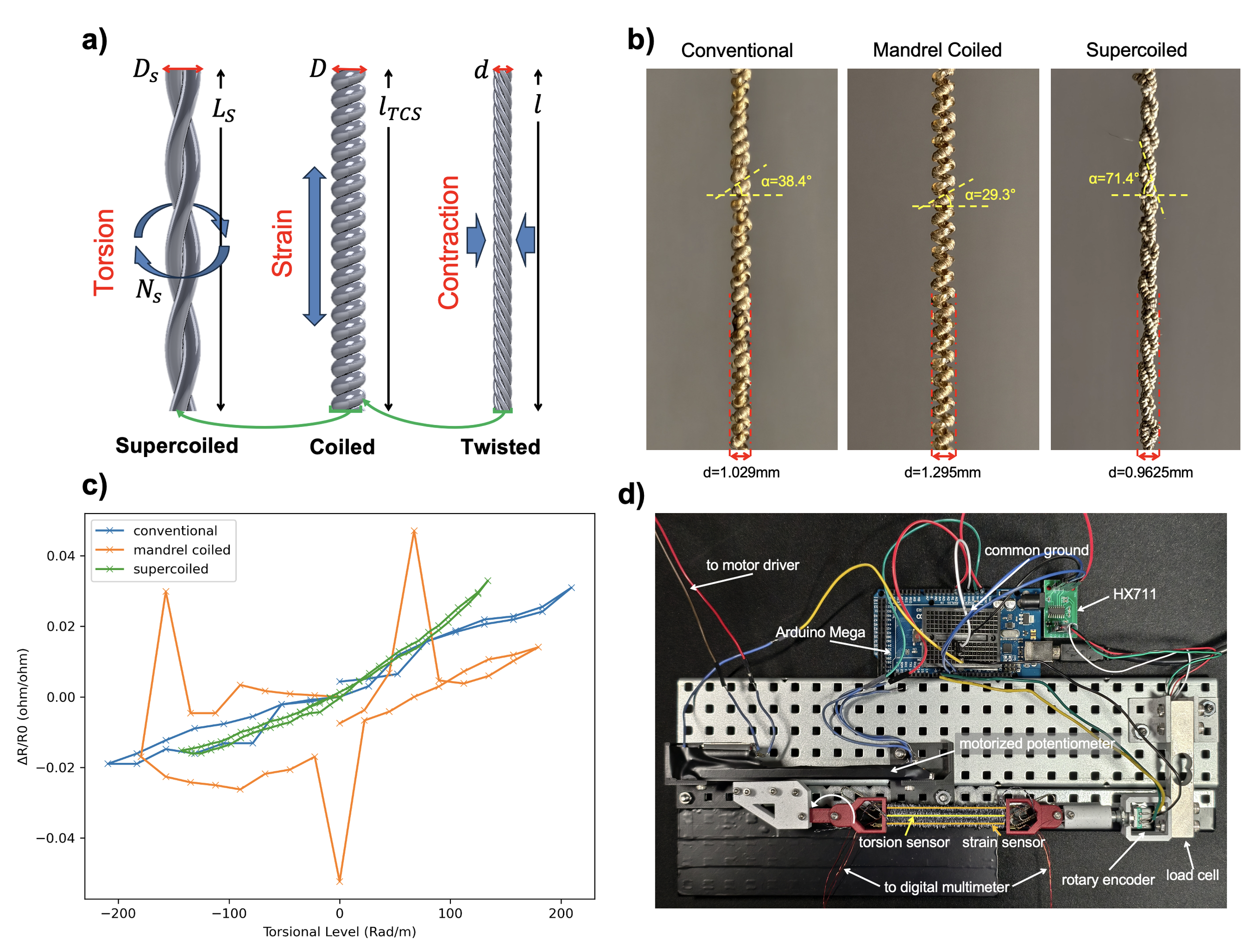
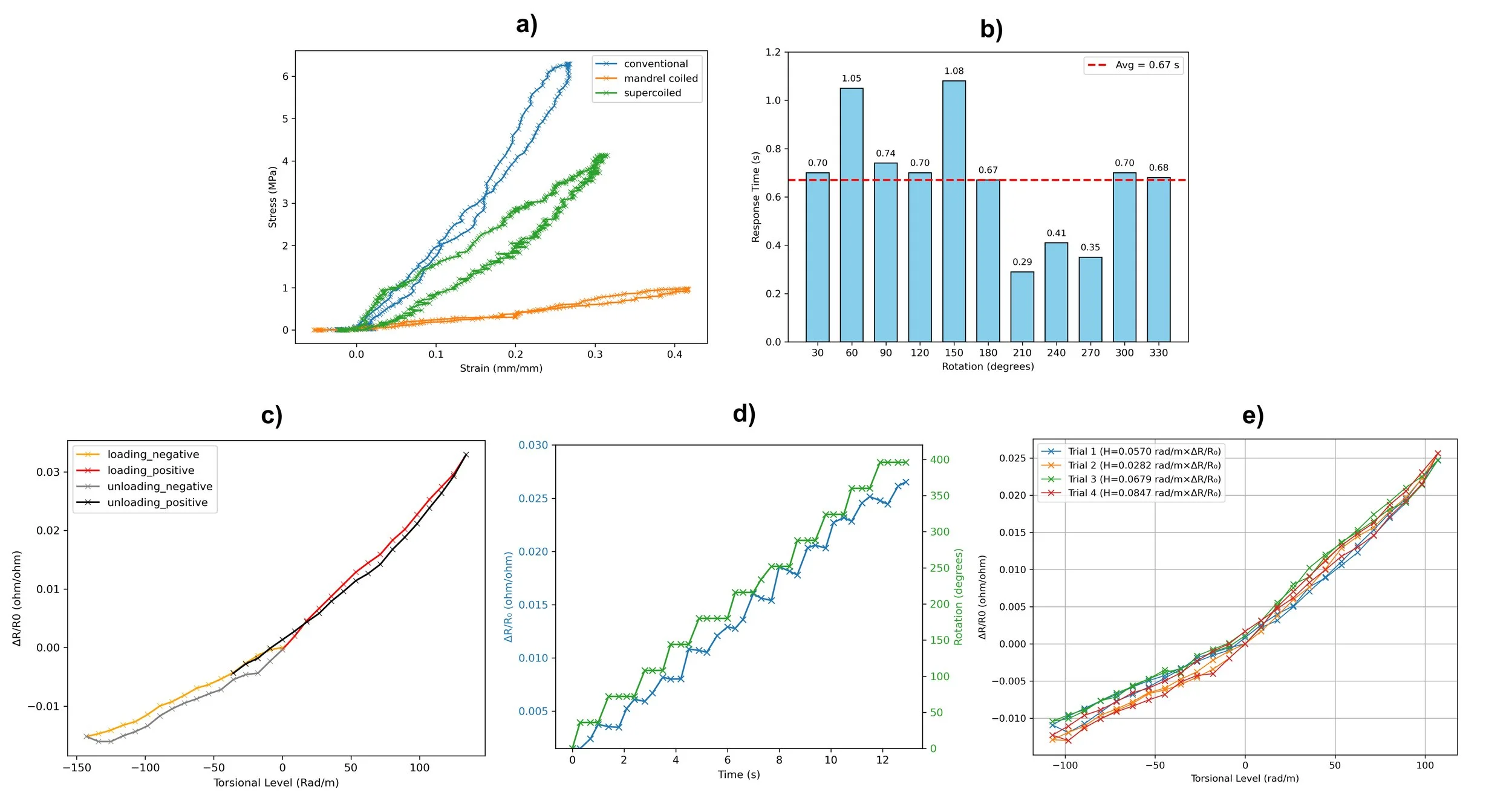
Existing torsional sensors trade off between low stiffness and high resolution, while our design leverages torque-balanced, two-ply supercoiled conductive threads to achieve high resolution across a wide torsional range (±7677◦ per meter), while maintaining mechanical compliance comparable to human tissue. We evaluate three TCP designs and identify the supercoiled configuration as optimal in terms of moduli (13.3 MPa), resolution (8.93 rad/m), hysteresis (0.0575 rad/m × ∆R/R0), and response time (0.67 s).
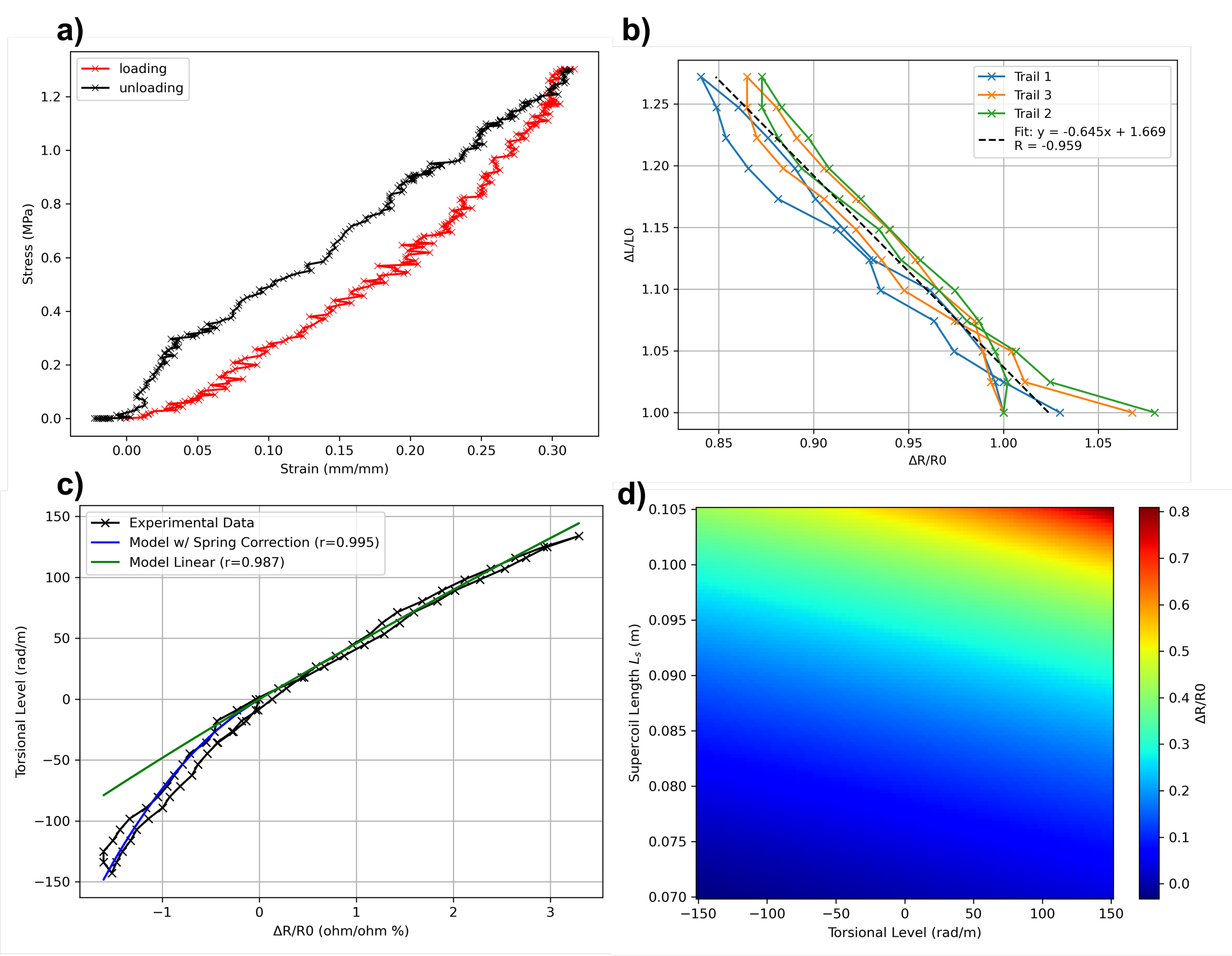
A physics-based model is developed to map resistance changes to torsional deformation, incorporating a spring constant correction factor to account for asymmetric stiffness. Finally, we integrate the sensor into a textile prototype and demonstrate its ability to reconstruct complex wrist joint motions through resistive sensing. This work introduces a scalable and soft-material-based approach for wearable torsion sensing and multimodal shape reconstruction.