Jun 2024 – Present
[NYU] Soft Robotic Hand Rehabilitation Device
Undergraduate Researcher
Prepared for Publication (Tentative Titles):
Qinsong Guo, Shashwat Sharma, Rui Li, Michael Knox, “Twisted and Coiled Polymer as Embedded Strain and Torsion Sensor for Robotics,” IEEE Sensors.
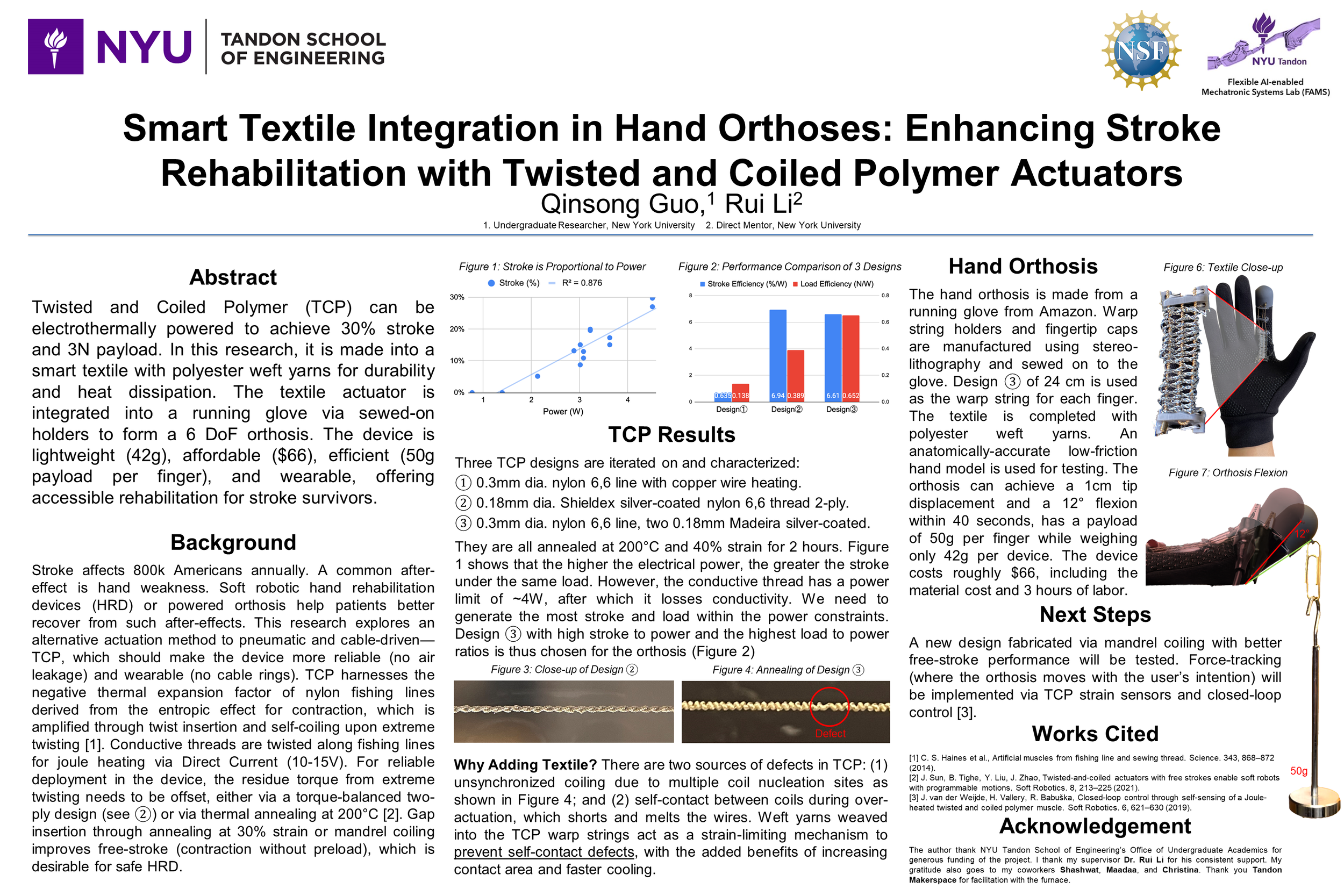
Qinsong Guo, Rui Li, “Smart Textile Integration in Hand Orthoses: Enhancing Stroke Rehabilitation with Twisted and Coiled Polymer Actuators,” Advanced Materials.
Supported by Tandon Undergraduate Summer Research Program (UGSRP) and the NYU FAMS Lab.
Stroke-induced hand motor function loss profoundly impacts daily life. This research advances hand rehabilitation devices (HRDs) with a lightweight orthosis powered by Twisted and Coiled Polymer (TCP) actuators, improving portability and usability compared to traditional pneumatic or cable-driven designs.
The 6-DoF orthosis integrates six 1-ply TCP actuators (two for the thumb) into a double-layered glove using a three-warp weaving pattern for finger flexion. The glove incorporates polyester and cotton weft yarns. TCP actuators are fabricated from 0.3 mm nylon 6,6 fishing line and 0.18 mm silver-plated conductive yarns, twisted and annealed at 40% strain at 200°C. The textile achieves a 10% stroke at 0.5 N preload and 30% at 3 N deployment load.
Six 2-ply torque-balanced TCP strain sensors, woven in a one-warp pattern on the glove's backside, enable shape sensing via resistance and passive finger extension. The system operates on 10 V, 0.5 A power, supplied by compact 12 V batteries. TCP actuators peak at 50°C during contraction and cool to ambient temperature in 14.3 s. Force-tracking control is implemented using PID algorithms in MATLAB, with TCP self-sensing for feedback. Data collection and control are managed through an Arduino UNO.
Research Poster