Jun 2024 – July 2025
[NYU] Self-Drive Vertically Integrated Project Team
Team Lead
NYU Self-Drive is a Vertically Integrated Project (VIP) team where students develop visual navigation solutions for small robots deployed in complex real-world environments. In summary, I:
Employed SIFT and ORB-SLAM visual navigation algorithms on a TurtleBot for real-time terrain mapping, collected training data using a customized ROS server, and developed autonomous driving solutions
As a team lead, developed and organized on-campus self-drive competitions featuring 20+ professionals and 4 groups
In more detail: I joined NYU Self-Drive in January 2024 and have since gained hands-on experience in Robotics Operating Systems (ROS), Mobile Object Rearrangement (MOR), and autonomous driving concepts and algorithms. I have applied advanced techniques such as VLAD, ORB-SLAM, and SIFT, leveraging programming languages like Linux, Python, and C++ to develop innovative solutions. Leading a student subteam of three, I spearheaded the development of an exploration and autonomous navigation pipeline, achieving a goal-to-goal time of 32 seconds in the internal Self-Drive competition in May 2024.
Promoted to VIP team lead in June 2024, I have since organized two recruitment cycles and led the development of the VIP curriculum. Working closely with our faculty advisor, Prof. Feng Chen, I have contributed to major grant applications, including the MUST Accelerator grant, and supported our team's proposal as a competition host for ICRA 2025. These responsibilities have significantly enhanced my interpersonal communication and professional writing skills.
As team leader, I have also taken an active role in outreach efforts, attending events like the VIP Showcase to represent the Self-Drive team. These experiences have honed my public speaking skills and further solidified my ability to lead and inspire a diverse group of students in advancing robotics education and innovation.
Showcasing the Interactive Demo with Co-lead Dennis (right)

Group Photo with Fall 2024 Members

Working in Lab on Visual Navigation Solutions with Teammates.
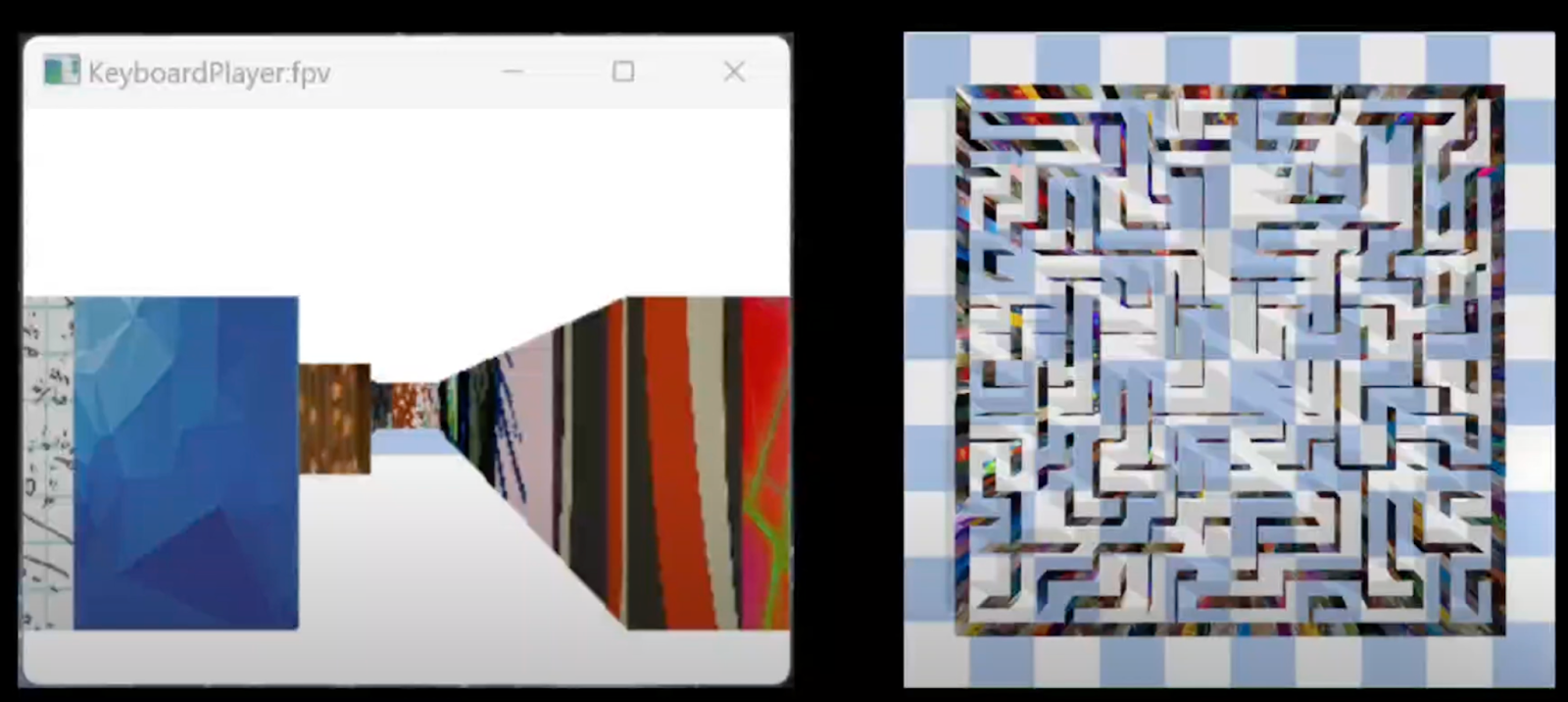
The Virtual Maze Environment for Batch Training

The Real-world Maze for Competition